Jako że świat nas wpycha w napędy elektryczne,postanowiłem się tym trochę zainteresować . I podczas sprawdzania różnych opcji natrafiłem na ciekawą niszę moim zdaniem. A mianowicie na silniki elektryczne z samochodów hybrydowych marki Honda, to co je wyróżnia ,to jest ich niska cena w porównaniu do mocy i możliwe że lepsza jakość miedzi i magnesów niż w chińskich silnikach do e-bike. Mi udało się taki silnik kupić ,można powiedzieć że za darmo, bo kupiłem cały silnik za 350zl a aluminium i kilka innych części pokryły te koszty. Ale na portalach aukcyjnych można je kupić za około 400-500zl.
- Silnik_aukcja.png (549.55 KiB) Przejrzano 21806 razy
Silniki były montowane w HONDA CIVIC, INSIGHT, JAZZ, CR-Z z oznaczeniami silnika IMA. LDA.
Chyba do 2008 była 1gen. o mocy 10KW i potem druga o mocy 15KW, można je rozróżnić bo zwiększoną moc uzyskali m.n. dzięki zastosowaniu płaskiego drutu nawojowego dzięki czemu „ upchnęli ” więcej miedzi w uzwojenia. ( co ciekawe 15KW jest mniejszy)
https://en.wikipedia.org/wiki/Honda_Civic_Hybrid
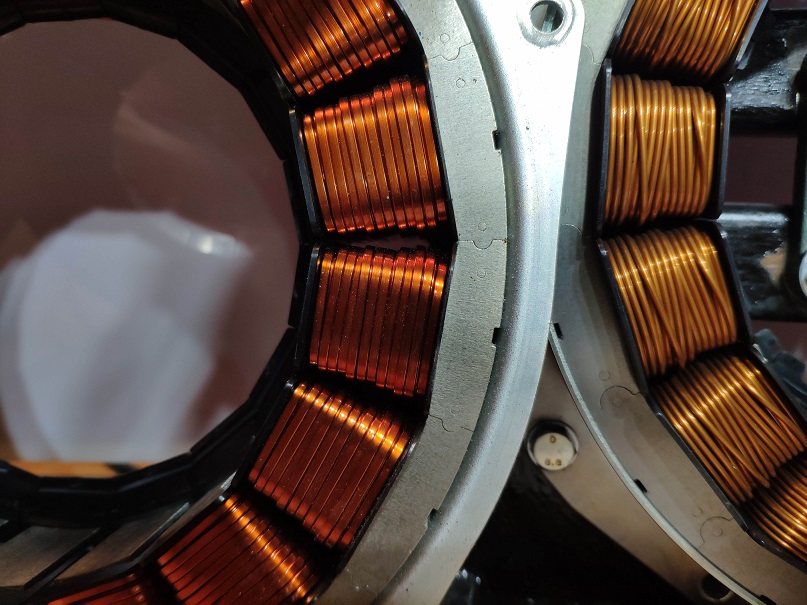
- Uzwojenia.jpg (877.97 KiB) Przejrzano 21806 razy
Problem tych silników jest taki że wirnik z magnesami jest bezpośrednio przykręcony do wału korbowego a stojan do bloku, i po zdemontowaniu nie posiadają ani wału ani obudowy. Dlatego też żeby próbować go uruchomić trzeba było dorobić wał z łożyskami i jakąś ramę do testów, a żeby zamknąć to w jakiś praktyczny projekt postanowiłem ze będzie to prototyp wyciągarki paralotniowej.
Silniki BLDC z magnesami stałymi są bardzo wydajne, ale ich wysterowanie nie jest łatwe. Praca takiego silnika polega na tym że pole magnetyczne indukowane w kolejnych cewkach ciągnie za sobą wirnik z magnesami, i sterownik żeby się to kręciło musi znać aktualną pozycję wału. W silnikach które się szybko kręcą i maja przewidywalne obciążenie ( drony , wentylatory) sterownik dostaje feedback bo magnesy tez indukują napięcie elektryczne w cewkach a procedura startowa to jakiś algorytm.
Silniki które się kręcą woniej i są rożnie obciążane potrzebują czujników żeby dokładnie określić położenie wału, zazwyczaj są to czujniki halla lub enkodery .
Zazwyczaj też konkretne silniki mają dedykowane do nich sterowniki, i tu był cały pies pogrzebany, bo niema na rynku niezależnego sterownika do silników z hybryd, a ten który jest w samochodzie trudno było by oddzielić i wysterować niezależnie.
Dlatego też postanowiłem eksperymentować ze sterownikami z rowerów elektrycznych. Ma to dużo zalet bo takie sterowniki mają wbudowane wiele dodatkowych funkcji jak ograniczenie prądu maksymalnego czyli regulacja siły ciągu, odzyskiwanie energii czyli hamulec, odłączenie przy zadanym napięciu czyli ochrona baterii, softstart i takie tam.
Wybrałem sterownik Sabvoton ML7260 przeznaczony do silników w piastach kół rowerowych, kręcą się wolniej od mid drive, które maja niską rezystancję uzwojeń.
Sterownik ma niby moc maksymalną 5KW ale to chyba w piku

. Był tani (410PLN) i przeznaczony jest na testy i ewentualne zepsucie. Będę mu podnosił moc aż się zaczną palić mosfety a potem może podmienię je na mocniejsze, ale jeszcze go nie otwierałem.
Podkukałem jakie czujniki halla są w silnikach dedykowanych do niego , zamontowałem je do tego z hondy" na pałę ", miedzy trzy kolejne cewki co pewnie jest żle bo prawdopodobie ma być co 60 lub 120 stopni magnetycznych a proporcja cewki magnesy jest 18/12.
Metodą prób i błędów ustaliłem odpowiednią konstelacje faz i czujników. Trochę się pokrztusił i ku mojemu zdumieniu zadziałało , i to bardzo dobrze. Droższe sterowniki mają procedurę początkową kiedy uczą się silnika którym będą sterować , kręcą się powoli kilka obrotów i korygują kąt halli w pamięci, i mój chyba też takie coś ma, choć nie było takiej procedury.
Silnik kreci się do prawie 1300RPM dlatego też chcąc maksymalnie wykorzystać moment obrotowy bęben ma tylko około 10cm średnicy .
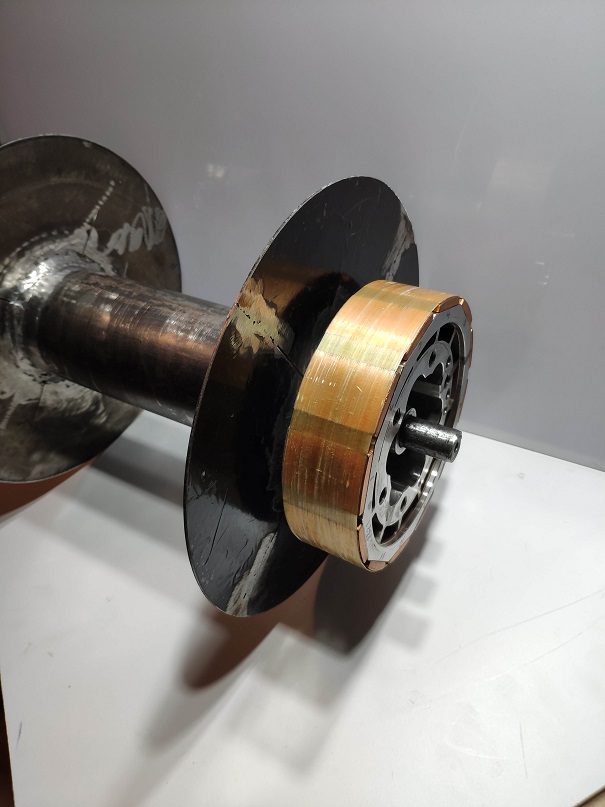
- Beben.jpg (802.64 KiB) Przejrzano 21806 razy
System zwijania liny to raczej nic innowacyjnego , arduino ,silnik krokowy , czujniki i trochę kodu. Może poza zastosowaniem paska zamiast śruby pociągowej, nie dało się już przyspieszyć procedury wykonywania kroków bo silnik krokowy nie wydalał przy tych prędkościach na wale i zastępując śrubę paskiem zmniejszyłem liczbę kroków na dane przesunięcie. I wiadomo prędkość kosztem siły , ( obawiałem się trochę czy nie będzie za słabe ale na razie się spisuje).
Zasilanie:
Tutaj przeczuwam że będzie najsłabsze ogniwo. Udało mi się kupić 12 akumulatorów Panasonic 7.8Ah 12v AGM w okazyjnej cenie, używanych ,ale sprawdzonych przez sprzedawcę z gwarancją. Mają swoją pojemność. Tylko pojemność to nie taki problem jak prąd pod którym będą pracować. Jeśli hol trwa 1,5min to można by było im pomóc boosterem z super kondensatorów ale te też nie są tanie i chyba nie opłaca się rzeżbić. Tak że prawdopodobnie czeka mnie budowa baterii Li-ion ,co nie jest już takie drogie ,kiedy bateria nie musi być super lekka i mała, to można wykorzystać więcej tańszych ogniw z depakietu.

- Akumulatory.jpg (884.33 KiB) Przejrzano 21806 razy
Zdalne sterowanie oparte na modułach Lora i arduino nano. Z ciekawostek to musiałem przenieść moduł w wyciągarce na rurkę wyżej , odfiltrować zasilanie i wyekranować bo nawet przy bardzo dobrej sile sygnału gubiła się łączność już po 100m, najprawdopodobniej sterownik silnika generuje duże zakłócenia. Warto było by też pewnie wymienić anteny na jakieś lepsze.
Do wstępnego testowania kupiłem 300m liny polipropylenowej 4mm o wytrzymałości 280kg ( około 120zł) , i chyba dobrze bo jak się ciąga po ziemi ,a nie leci to się szybko niszczy a szkoda było by dyneemy.
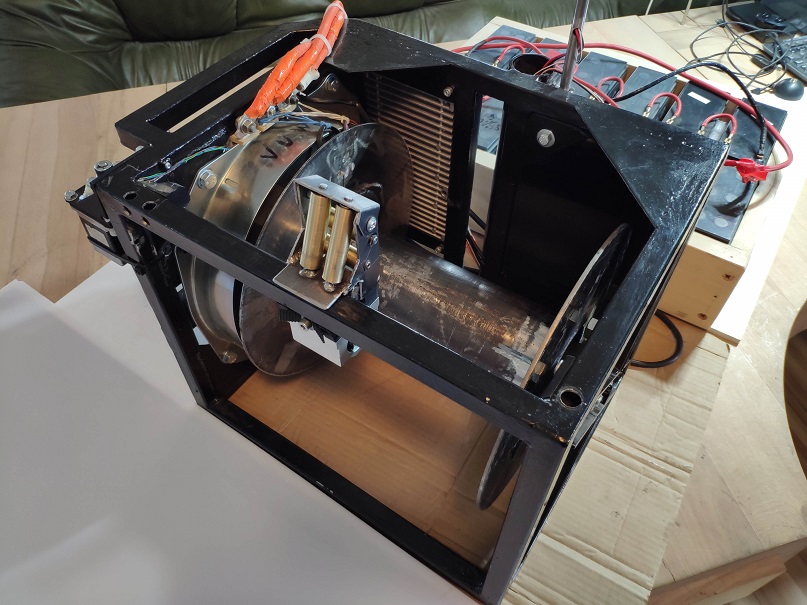
- Wyciagarka.jpg (899.2 KiB) Przejrzano 21806 razy

- Wyciagarka_mocowanie.jpg (926.81 KiB) Przejrzano 21806 razy
Na razie wstępnie zrobiłem kilka przejazdów pod górkę na sankach koło domu na odcinku może 100m , i miota jak szatan

. Ciężko się było na sankach utrzymać (sanki dolne B) , trzeba było zmienić pozycję na leżącą.
Ciężko mi określić ile brakuję mocy do normalnego holu, bo z holami miałem do czynienia 10x na kursie i tyle. Na pewno będzie potrzeba mniej KW niż w silnikach spalinowych które mają mniejszy moment dostępny w wąskim zakresie obrotów, i kilka przekładni generujących straty.
Może z drugiego silnika 15KW zrobię hamownie dla tej wyciągarki, trzeba by było je jakoś połączyć i ten 15KW pracował by jako prądnica.
Projekt był budowany „ po taniości ” bo była duża szansa na niepowodzenie , i celem jest może nawet bardziej poznanie możliwości takiego silnika, do wykorzystania w innych aplikacjach. Bo w mojej okolicy i tak łatwiej logistycznie, i mniej problemowo jest latać z górek. Na razie wszystko wyszło poniżej 1000PLN.
Jako że świat nas wpycha w napędy elektryczne,postanowiłem się tym trochę zainteresować . I podczas sprawdzania różnych opcji natrafiłem na ciekawą niszę moim zdaniem. A mianowicie na silniki elektryczne z samochodów hybrydowych marki Honda, to co je wyróżnia ,to jest ich niska cena w porównaniu do mocy i możliwe że lepsza jakość miedzi i magnesów niż w chińskich silnikach do e-bike. Mi udało się taki silnik kupić ,można powiedzieć że za darmo, bo kupiłem cały silnik za 350zl a aluminium i kilka innych części pokryły te koszty. Ale na portalach aukcyjnych można je kupić za około 400-500zl.
[attachment=5]Silnik_aukcja.png[/attachment]
Silniki były montowane w HONDA CIVIC, INSIGHT, JAZZ, CR-Z z oznaczeniami silnika IMA. LDA.
Chyba do 2008 była 1gen. o mocy 10KW i potem druga o mocy 15KW, można je rozróżnić bo zwiększoną moc uzyskali m.n. dzięki zastosowaniu płaskiego drutu nawojowego dzięki czemu „ upchnęli ” więcej miedzi w uzwojenia. ( co ciekawe 15KW jest mniejszy)
https://en.wikipedia.org/wiki/Honda_Civic_Hybrid
[attachment=4]Uzwojenia.jpg[/attachment]
Problem tych silników jest taki że wirnik z magnesami jest bezpośrednio przykręcony do wału korbowego a stojan do bloku, i po zdemontowaniu nie posiadają ani wału ani obudowy. Dlatego też żeby próbować go uruchomić trzeba było dorobić wał z łożyskami i jakąś ramę do testów, a żeby zamknąć to w jakiś praktyczny projekt postanowiłem ze będzie to prototyp wyciągarki paralotniowej.
Silniki BLDC z magnesami stałymi są bardzo wydajne, ale ich wysterowanie nie jest łatwe. Praca takiego silnika polega na tym że pole magnetyczne indukowane w kolejnych cewkach ciągnie za sobą wirnik z magnesami, i sterownik żeby się to kręciło musi znać aktualną pozycję wału. W silnikach które się szybko kręcą i maja przewidywalne obciążenie ( drony , wentylatory) sterownik dostaje feedback bo magnesy tez indukują napięcie elektryczne w cewkach a procedura startowa to jakiś algorytm.
Silniki które się kręcą woniej i są rożnie obciążane potrzebują czujników żeby dokładnie określić położenie wału, zazwyczaj są to czujniki halla lub enkodery .
Zazwyczaj też konkretne silniki mają dedykowane do nich sterowniki, i tu był cały pies pogrzebany, bo niema na rynku niezależnego sterownika do silników z hybryd, a ten który jest w samochodzie trudno było by oddzielić i wysterować niezależnie.
Dlatego też postanowiłem eksperymentować ze sterownikami z rowerów elektrycznych. Ma to dużo zalet bo takie sterowniki mają wbudowane wiele dodatkowych funkcji jak ograniczenie prądu maksymalnego czyli regulacja siły ciągu, odzyskiwanie energii czyli hamulec, odłączenie przy zadanym napięciu czyli ochrona baterii, softstart i takie tam.
Wybrałem sterownik Sabvoton ML7260 przeznaczony do silników w piastach kół rowerowych, kręcą się wolniej od mid drive, które maja niską rezystancję uzwojeń.
Sterownik ma niby moc maksymalną 5KW ale to chyba w piku ;) . Był tani (410PLN) i przeznaczony jest na testy i ewentualne zepsucie. Będę mu podnosił moc aż się zaczną palić mosfety a potem może podmienię je na mocniejsze, ale jeszcze go nie otwierałem.
Podkukałem jakie czujniki halla są w silnikach dedykowanych do niego , zamontowałem je do tego z hondy" na pałę ", miedzy trzy kolejne cewki co pewnie jest żle bo prawdopodobie ma być co 60 lub 120 stopni magnetycznych a proporcja cewki magnesy jest 18/12.
Metodą prób i błędów ustaliłem odpowiednią konstelacje faz i czujników. Trochę się pokrztusił i ku mojemu zdumieniu zadziałało , i to bardzo dobrze. Droższe sterowniki mają procedurę początkową kiedy uczą się silnika którym będą sterować , kręcą się powoli kilka obrotów i korygują kąt halli w pamięci, i mój chyba też takie coś ma, choć nie było takiej procedury.
Silnik kreci się do prawie 1300RPM dlatego też chcąc maksymalnie wykorzystać moment obrotowy bęben ma tylko około 10cm średnicy .
[attachment=3]Beben.jpg[/attachment]
System zwijania liny to raczej nic innowacyjnego , arduino ,silnik krokowy , czujniki i trochę kodu. Może poza zastosowaniem paska zamiast śruby pociągowej, nie dało się już przyspieszyć procedury wykonywania kroków bo silnik krokowy nie wydalał przy tych prędkościach na wale i zastępując śrubę paskiem zmniejszyłem liczbę kroków na dane przesunięcie. I wiadomo prędkość kosztem siły , ( obawiałem się trochę czy nie będzie za słabe ale na razie się spisuje).
Zasilanie:
Tutaj przeczuwam że będzie najsłabsze ogniwo. Udało mi się kupić 12 akumulatorów Panasonic 7.8Ah 12v AGM w okazyjnej cenie, używanych ,ale sprawdzonych przez sprzedawcę z gwarancją. Mają swoją pojemność. Tylko pojemność to nie taki problem jak prąd pod którym będą pracować. Jeśli hol trwa 1,5min to można by było im pomóc boosterem z super kondensatorów ale te też nie są tanie i chyba nie opłaca się rzeżbić. Tak że prawdopodobnie czeka mnie budowa baterii Li-ion ,co nie jest już takie drogie ,kiedy bateria nie musi być super lekka i mała, to można wykorzystać więcej tańszych ogniw z depakietu.
[attachment=2]Akumulatory.jpg[/attachment]
Zdalne sterowanie oparte na modułach Lora i arduino nano. Z ciekawostek to musiałem przenieść moduł w wyciągarce na rurkę wyżej , odfiltrować zasilanie i wyekranować bo nawet przy bardzo dobrej sile sygnału gubiła się łączność już po 100m, najprawdopodobniej sterownik silnika generuje duże zakłócenia. Warto było by też pewnie wymienić anteny na jakieś lepsze.
Do wstępnego testowania kupiłem 300m liny polipropylenowej 4mm o wytrzymałości 280kg ( około 120zł) , i chyba dobrze bo jak się ciąga po ziemi ,a nie leci to się szybko niszczy a szkoda było by dyneemy.
[attachment=1]Wyciagarka.jpg[/attachment]
[attachment=0]Wyciagarka_mocowanie.jpg[/attachment]
https://www.youtube.com/watch?v=_QoB45467G4&ab_channel=michaljontos
https://www.youtube.com/watch?v=mlC_nw7d5PI&ab_channel=michaljontos
Na razie wstępnie zrobiłem kilka przejazdów pod górkę na sankach koło domu na odcinku może 100m , i miota jak szatan :P . Ciężko się było na sankach utrzymać (sanki dolne B) , trzeba było zmienić pozycję na leżącą.
Ciężko mi określić ile brakuję mocy do normalnego holu, bo z holami miałem do czynienia 10x na kursie i tyle. Na pewno będzie potrzeba mniej KW niż w silnikach spalinowych które mają mniejszy moment dostępny w wąskim zakresie obrotów, i kilka przekładni generujących straty.
Może z drugiego silnika 15KW zrobię hamownie dla tej wyciągarki, trzeba by było je jakoś połączyć i ten 15KW pracował by jako prądnica.
Projekt był budowany „ po taniości ” bo była duża szansa na niepowodzenie , i celem jest może nawet bardziej poznanie możliwości takiego silnika, do wykorzystania w innych aplikacjach. Bo w mojej okolicy i tak łatwiej logistycznie, i mniej problemowo jest latać z górek. Na razie wszystko wyszło poniżej 1000PLN.